
Minikame
TODO: description here

Minikame is a robot I designed in 2016 while working at the innovation lab of the now-defunct Spanish company BQ. At the time, I created several legged robots that allowed me to experiment with walking gaits based on oscillators and CPGs (Central Pattern Generators).
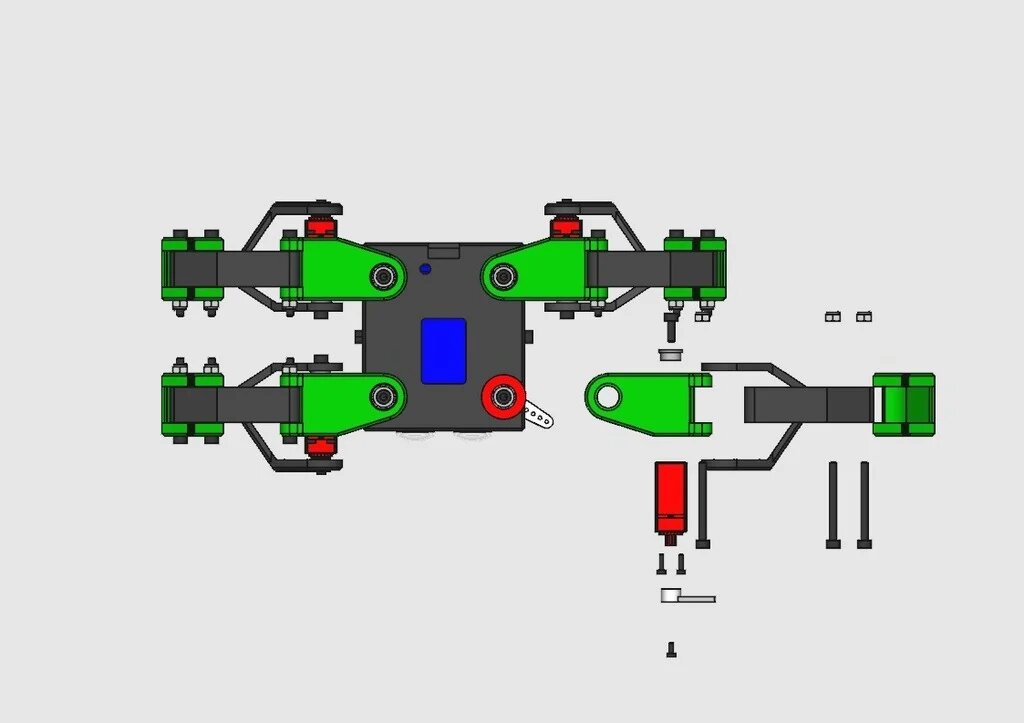
Minikame is a quadruped robot with 8 degrees of freedom. Its most distinctive feature is the use of a PLM (Parallel Leg Mechanism) in its legs (inspired by RC cars and Japanese humanoid robots!) In other words, the leg geometry is based on articulated parallelograms. This design ensures that the feet remain parallel to the ground throughout movement.
The robot is controlled by a NodeMCU board based on the ESP8266, which means it has built-in Wi-Fi. You can send movement commands over the network using apps like Airpad (another project developed by the BQ team) or even control it via a Telegram bot.
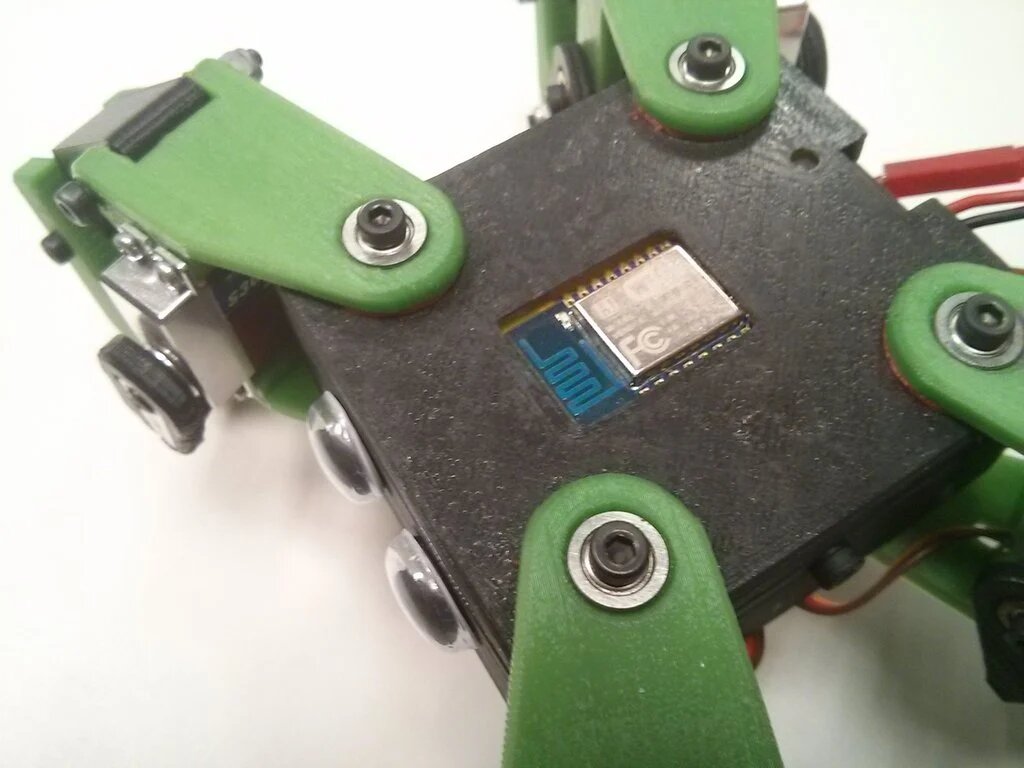
As for the servos, I used the very fast (and expensive!) Turnigy TGY-306G-HV, originally manufactured by KST. I chose these servos so that Minikame could jump. Since they’re HV (High Voltage) servos, I was able to connect them directly to a 2S LiPo battery without needing voltage converters, saving a lot of space (something that’s in short supply in this project). All of Minikame’s “guts” are tightly packed inside its body, which made it a pretty challenging robot to assemble.
The robot’s movements are generated using oscillator-based algorithms, the same ones used in Zowi, Maus, and Raider.
This robot is probably one of the most recognized among the ones I’ve built. Today, there are dozens of replicas of Minikame out there, as well as many remakes that either modify the original design or reuse parts of it in other robotic creations.

Minikame was featured on Hackaday on January 29th, 2016: Adorable Quadruped Robot Hops and Walks
Project source and build instructions: GitHub repository
Some videos of the original Minikame in action!
Comments