
Zowi, introducción a los robots bípedos
Este post es una copia del original escrito por mi y publicado el 07/04/2015 en la plataforma DIWO de BQ
Normalmente, todos los textos dedicados a robots bípedos comienzan alabando las ventajas que pueden tener lo robots con patas respecto a los robots movidos por ruedas u otro elementos rotativos. Sin embargo, me gustaría enfocar el tema desde otro punto de vista: los robots con patas molan.
Molan, sin darle más vueltas, y como molan vale la pena quebrarse la cabeza con configuraciones mecánicas imposibles, ecuaciones horribles y resultados frustrantes. No son robots muy agradecidos, su puesta en marcha suele ser lenta (y desoladora), y suele ser raro que funcionen al primer intento como todos los robots. En general, estos robots son un reto tanto para ingenieros como para aficionados a la robótica.
Centrándonos en los robots con dos patas, es decir bípedos; podemos encontrarnos infinidad de conceptos: desde bípedos sencillos con un solo motor hasta humanoides con más de veinte articulaciones.

Un buen robot bípedo debe ser capaz de modificar la posición de sus elementos mecánicos, para desplazar dinámicamente su centro de gravedad. De hecho, esta capacidad será el ingrediente más importante a la hora de conseguir que nuestro robot se mantenga de pie. Un robot en una posición estática se mantendrá estable si la proyección de su centro de gravedad sobre la superficie horizontal se encuentra dentro del área acotada por los puntos de apoyo del robot. En resumen, para que un robot llegue a caminar, es necesario que sea capaz de apoyar su peso en un pie o en otro, en diferentes instantes de tiempo.
 |
 |
A la hora de diseñar y construir robots bípedos, una primera opción son los robots con 2-3 grados de libertad. Si existe un padre de este tipo de robots, ese es David Buckley. En 1998 construyó el BigFoot, un robot que con solo dos servos tiene la capacidad de moverse hacia delante, hacia atrás y realizar giros.

En este vídeo se puede observar cómo el robot balancea el peso inclinando de su propia estructura para apoyarse sobre sus pies alternativamente. Sin embargo, existe otra forma de abordar el problema del reparto de pesos. Hay diseños que consiguen este efecto mediante el movimiento de una masa móvil, como es el caso de Archer de Kåre Halvorsen, o Dead Duck de Frits Lyneborg. Los dos robots tienen colocado un componente pesado en su parte superior. Desplazando lateralmente esa masa, consiguen situar el centro de gravedad del robot sobre el pie de apoyo.
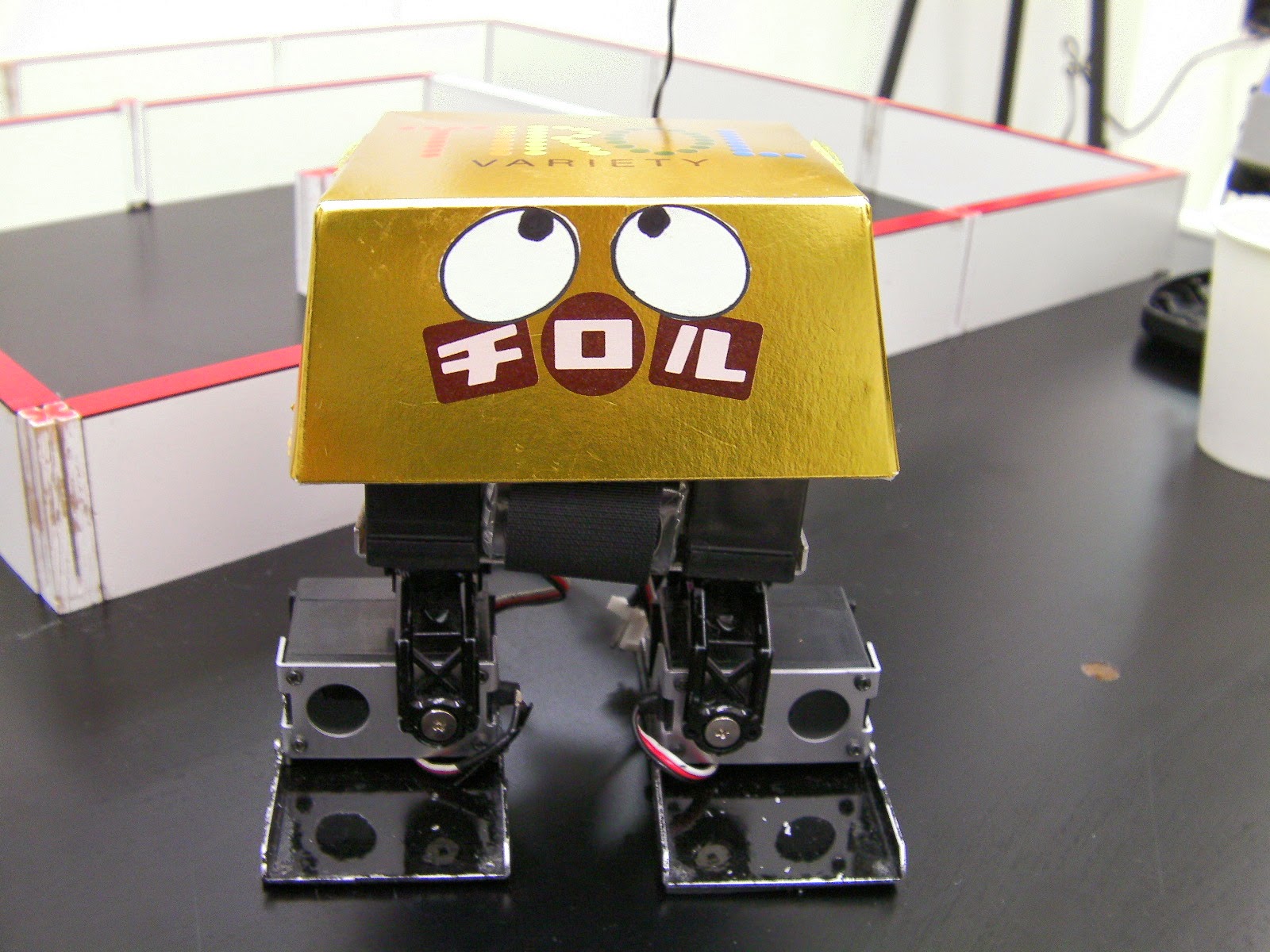
Dando un paso más, entramos en la configuración de cuatro articulaciones. Normalmente, cuando se utilizan cuatro servos, éstos se distribuyen en dos pares simétricos para cada pierna. Estos servos pueden estar conectados tanto en configuraciones de roll-yaw como yaw-roll sin existir diferencias notables en su control. Uno de los precursores de este tipo de bípedos fue David Steadman con el Stead-e-Man. Esta configuración ha inspirado a cientos de robot bípedos, tanto diseños comerciales como proyectos abiertos. Incluso existen competiciones pensadas para estos robots, como la TIROL-CHOCO Robot Competition, en Japón.
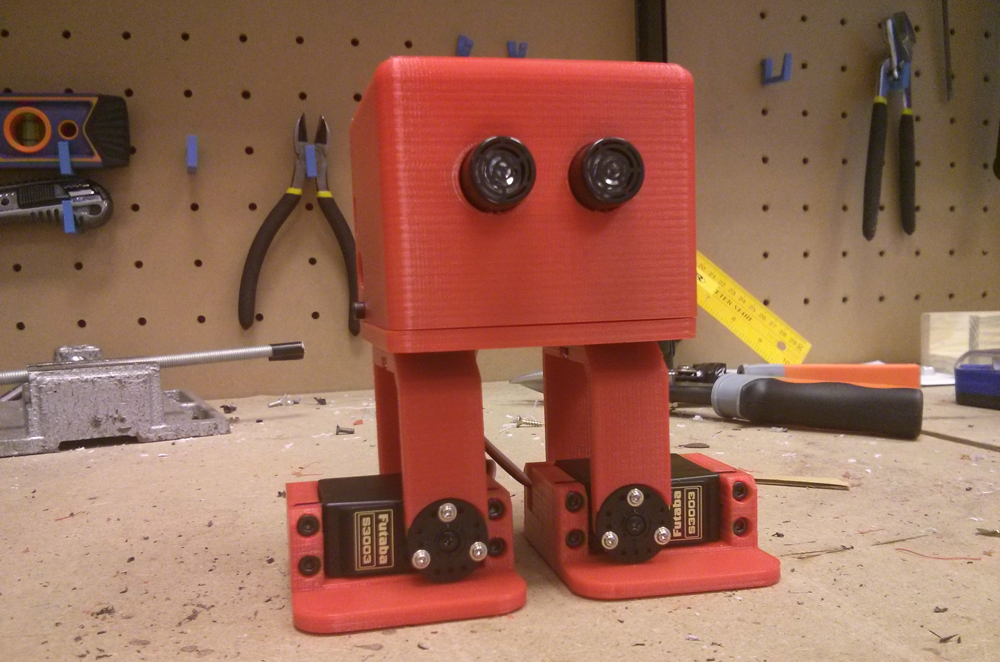
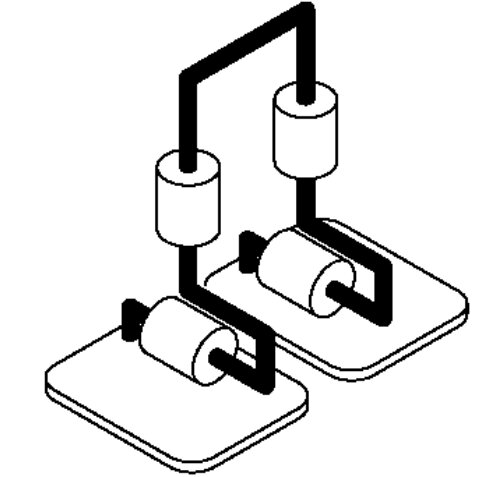
Uno de los robots más famosos de este tipo es BoB, un pequeño robot imprimible creado por Kevin Biagini y liberado con licencia CC-BY-SA. Este robot ha servido de inspiración para el diseño de Zowi. Zowi se ha diseñado completamente en FreeCAD, con piezas procedentes de algunos robots del proyecto MYOD y dimensionado para albergar una placa ZUM y servos de tamaño estándar. El modelo cinemático de Zowi corresponde a una disposición yaw-roll, representada en el siguiente esquema.
En el caso de BoB, el eje de rotación vertical (yaw) se situaba desplazado 5 mm, además, en BoB, este desplazamiento limitaba el rango de giro (roll) lateral a 45º. Zowi tiene capacidad para girar dicha articulación 90º, o dicho de otro modo, no limita mecánicamente el movimiento del servo y le permite realizar un rango completo de 180º. Además, el hecho de utilizar servos de tamaño estándar con brackets dobles, respecto a BoB, que utiliza micro-servos con brackets simples; le aporta una robustez y precisión muy superiores en su movimiento.
Zowi, al tener una base mecánica tan simple, se ofrece como un punto de partida para aprender cómo funcionan los robots con patas y experimentar con diferentes movimientos. Además, es un robot fácilmente modificable y derivable, con algunas modificaciones tan simpáticas como JIM de Sonia Verdú.
Si te ha gustado este post, te recomiendo visitar el repositorio de Github de Zowi, donde se encuentran todas las fuentes necesarias para construirlo.
Comments